Роботи нового покоління: інноваційний підхід до навчання без кодування
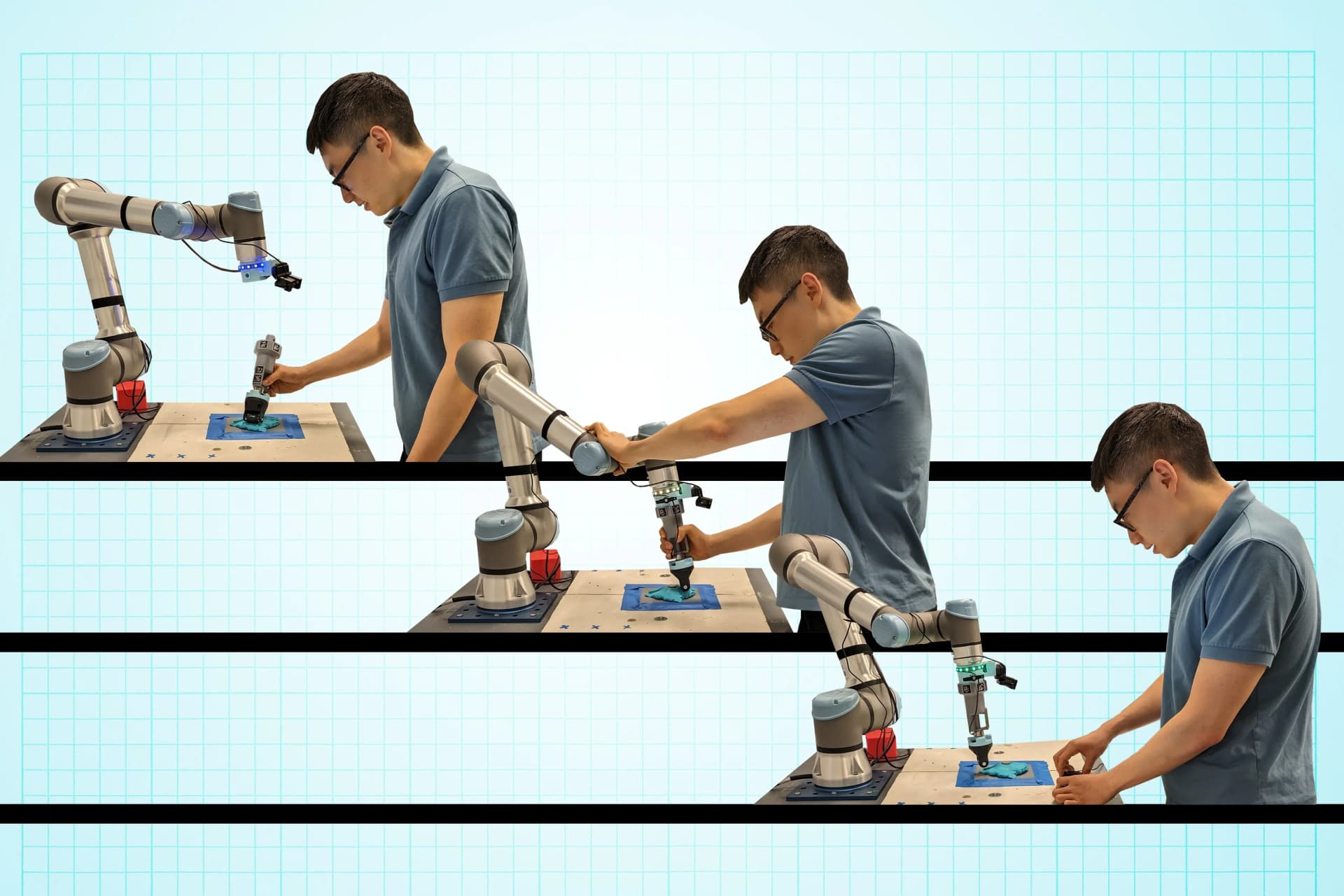
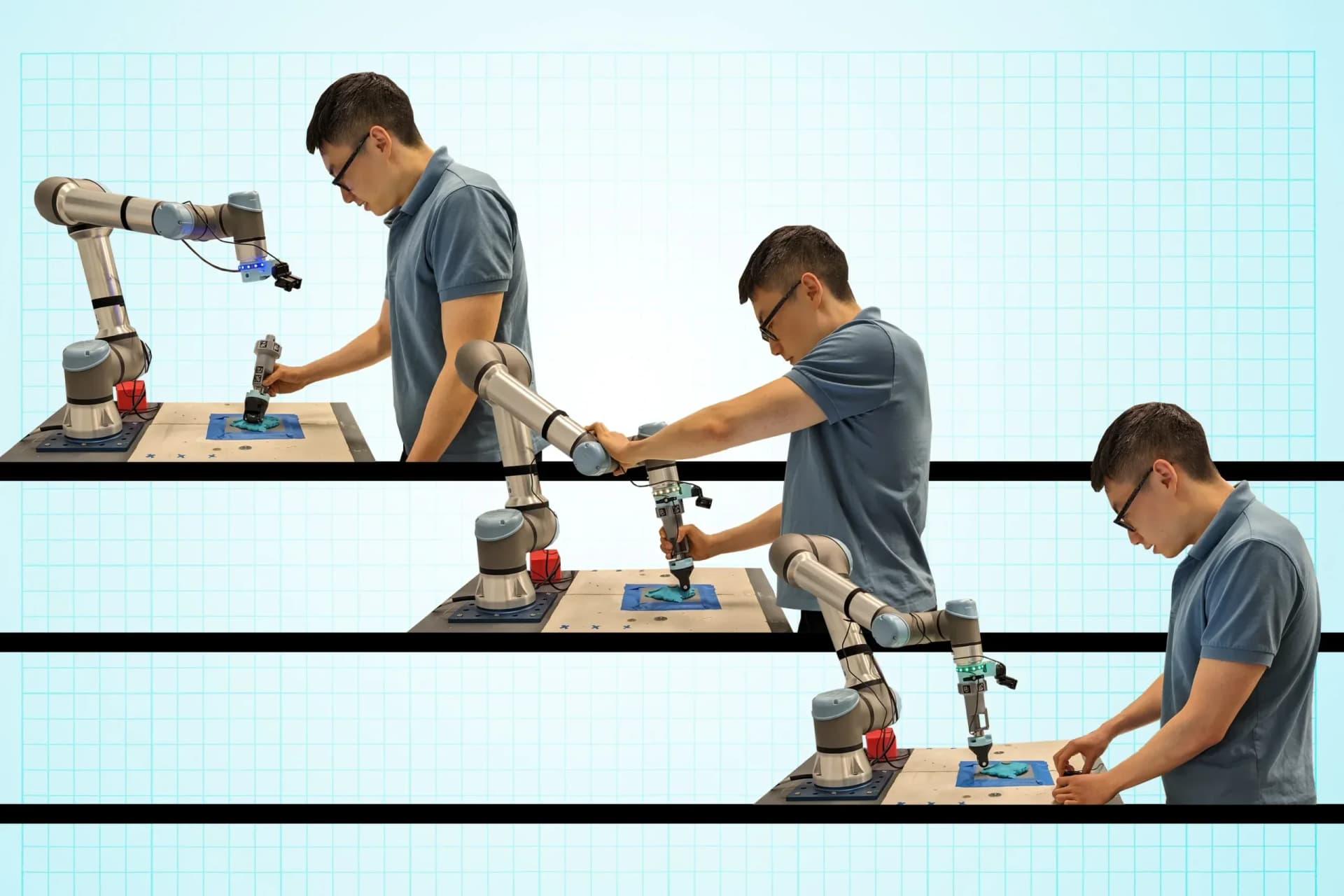
Інженери MIT представили новий підхід до навчання роботів, що не вимагає кодування. Інноваційний "універсальний демонстраційний інтерфейс" дозволяє роботам навчатися від будь-кого, використовуючи три методи навчання: телероботу, кінестетичне навчання та природне навчання. Цей інтерфейс, що кріпиться до звичайних колаборативних роботизованих рук, забезпечує більшу гнучкість у виборі способу навчання.
Три в одному: інтерфейс для навчання роботів
Новий інтерфейс MIT дозволяє роботам навчатися шляхом віддаленого управління, фізичного переміщення або шляхом спостереження за діями людини. Він оснащений камерою та сенсорами, що фіксують рухи та силу, застосовану під час виконання завдання. Це дозволяє роботам отримувати більше інформації та адаптуватися до різних завдань.
Інтерфейс був успішно протестований на стандартному колаборативному роботі, де волонтери виконували завдання з виробництва. Це показує, що такий підхід може бути корисним не лише на виробництві, але й у домашніх і медичних умовах.
Перспективи використання та розвитку
Інженери вважають, що їхній винахід може змінити уявлення про взаємодію людей з роботами, дозволяючи навчати їх складним завданням. Майк Хагеноу, постдок у MIT, підкреслює, що такі роботи можуть стати інтелектуальними напарниками для людей, підвищуючи ефективність роботи в різних сферах.
Ця нова технологія може стати важливим кроком у напрямку більш широкого впровадження роботів у різні галузі, що робить цікавим подальший розвиток і вдосконалення цієї системи.
Як вам матеріал? Оберіть реакцію